Robots Are Going Soft
Materials innovations are helping create less rigid, more compliant robotic structures.
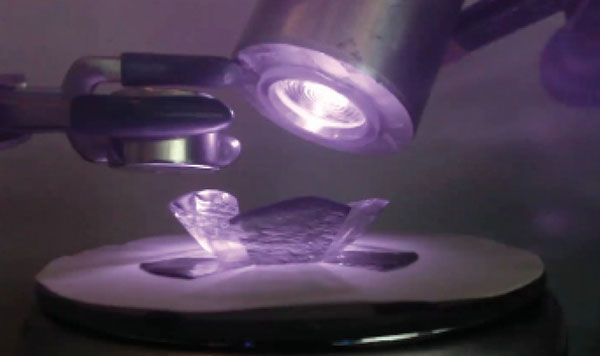
Fig. 1: North Carolina State University Researchers have developed robots made of shape-memory polymer seeded with iron particles, whose movements can be magnetically controlled. Image courtesy of Jessica A.-C. Liu.


Latest News
December 1, 2019
Robots made exclusively of hard materials prove their worth every day in industrial applications, excelling at repetitive, physically demanding and dangerous tasks that human counterparts cannot take on. Some robotics providers, however, want to steer the design and construction of these machines in a new direction.
Driven by robotic use cases in healthcare and cooperative human assistance applications, designers have begun to develop less rigid, more mechanically compliant robots. This new class of machines is constructed of soft materials engineered to mimic properties of soft biological tissue, matching its compliance, elasticity and low density.
These properties allow soft robots to bend, stretch and conform to other objects, as well as make physical contact without imparting large forces. This class of robots can operate more safely around humans and better handle fragile objects, such as fruit, electronics and human organs.
New Materials Flex Their Muscles
The current generation of robots derives its “soft” qualities from newly developed materials and existing substances used in new ways. These include specialized polymers, gels and fluids.
“Use of functional polymers in soft robotics can impart functional flexibility and multifunctionality in addition to mechanical flexibility,” says Jessica Liu, graduate research assistant at North Carolina State University. “Soft robots can be designed to bend and twist with high curvatures, allowing them to navigate within confined spaces.”
Another advantage of soft materials is that they can be integrated into other material systems without altering natural mechanical properties. “Most soft materials can be cast in a 3D-printed mold or directly printed into 3D shapes using additive manufacturing,” says Carmel Majidi, associate professor of mechanical engineering at Carnegie Mellon University. “When combined with conductive fluids or elastomers, they can also be used to make soft, flexible and stretchable circuits, sensors and radio antennae.”
Morphing Materials
One approach to building soft robots is to use “shape-memory” materials, which change shape and stiffness in response to heat or electrical stimulation. Two popular types of shape-memory material include nickel-titanium alloy and liquid crystal elastomers. Liquid-crystal elastomers are soft polymers that can remember their shape after they have deformed, springing back to their natural rest configuration when stimulated (Fig. 1).
Over the past few years, the Soft Machines Lab at Carnegie Mellon University has been building soft robots using nickel-titanium alloy. These machines can perform a wide range of locomotion modes, including walking, crawling, rolling, jumping and swimming.
More recently, the group has developed a type of electrically conductive liquid crystal elastomer that can be stimulated with electrical current.
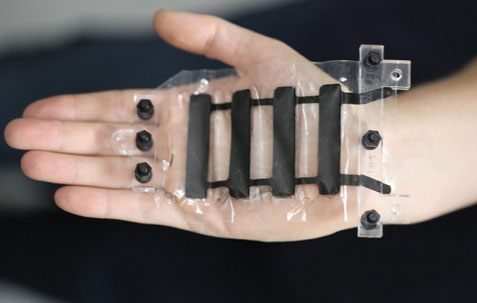
“This is accomplished by filling the elastomer with droplets of a metal alloy that is liquid at room temperature,” says Majidi. “These liquid metal droplets form a connected network within the elastomer that allows electrical current to flow through the material and induce the shape-memory effect through local heating. Applications of this composite include a robot ‘muscle’ and stretchable circuit wiring that can remain functional when punctured or torn (Fig. 2).”

Benefits of Soft Materials
Compliance has proven to be a main advantage offered by these machines. One of the most important advantages lies in the robots’ ability to dynamically adapt to changing environmental conditions better than conventional robots made of rigid materials. For example, soft materials and their built-in feedback mechanisms allow robots to alter their shape to accommodate new operating demands, such as squeezing through confined spaces.
“Soft robots adapt to dynamic or unpredictable environments better than hard robots, because when they come into contact with elements of the environment, they don’t need sensors to react to an unexpected stimulus,” says Philipp Rothemund, postdoctoral fellow in the Keplinger Research Group at the University of Colorado, Boulder. “They simply deform around the object.”
In addition to enabling greater adaptability, the robots’ compliance also offers designers several significant benefits. For example, the low elasticity, low density and versatile chemistry of these materials reduce weight, cut development costs and make it easier to reconfigure the machines, streamlining the design and implementation of custom units.
Self-Help Features
Along with the compliance that brings so many benefits to soft robots, the materials used to construct these machines also open the door for capabilities that can reduce design complexity. One of these is self-sensing.
Among soft robot materials, dielectric elastomers—an elastomer set between two electrodes— and other similar-acting components present self-sensing properties. The dielectric “sandwich” acts as a capacitor. When opposite charges are applied to the electrodes, they are attracted to each other, squeezing the dielectric and changing its thickness, which in turn changes its capacitance. With a known voltage input and capacitance readout, an engineer can derive the thickness of the dielectric, and from there tell if the material is fully actuated or has come into contact with something that is preventing its full actuation.
In addition to self-sensing capabilities, some soft robots also have self-healing features. The machines make structural repairs by applying specially engineered materials via chemical reactions, fluid flow and material phase change processes.
For example, chemical reactions based on reversible hydrogen bonding can be used to reattach torn or severed robot components.
Using a different method, robots can repair torn or severed thermoplastic components using a material phase change process in which the machine applies heat to fuse the damaged parts back into their original place.
Looking at another repair scenario, soft robots with damaged conductive pathways can use a fluid flow process to form new connections. Here, the robot applies electrically conductive materials that contain droplets of liquid metal, which form new pathways when the liquid metal flows into surround areas of the robot.
Material Challenges
Even with these benefits, robot designers also should be aware of the challenges yet to be overcome. One of the biggest obstacles currently encountered by engineers stems from the fact that the material science supporting soft robotics is still in the early stages of its development. As a result, a number of sticking points continue to hinder soft robotics evolution.
For example, the current collection of materials used by soft robot developers offers only limited functionality. Although elastomers and fluids have proven to be a good match for the mechanical properties of biological materials, they typically do not have adequate electrical, thermal or electromagnetic properties to replace the functions of motors and electronics.
This shortcoming, however, has not escaped the attention of leading developers of soft robots. In fact, much of the field’s work focuses on creating new types of soft multifunctional materials that can address these issues.
The process of developing an inventory of materials that can bring soft robotics to their full potential, however, has its own challenges. One of the greatest of these is that developers have yet to fully analyze the materials being used. Developers must attain a better understanding of the materials in use before optimizing for soft robot construction.
Another obstacle is the nonlinearity of soft materials.
“Because soft materials do not behave linearly to applied forces, unlike hard materials, new design and testing tools need to be developed to analyze soft materials,” says Rothemund. “In addition, soft robots require fewer sensors to respond to stimuli, and fewer sensors means fewer control systems. Whatever control systems a soft robot does need would have to handle nonlinearity, and therefore are more complicated to implement.”
Along with nonlinearity, designers must also contend with issues arising from soft materials’ irregular deformation.
“A challenge with using soft materials is that the deformation of the robot becomes unconstrained,” says Majidi. “Rather than just moving at a discrete number of joints or motors, a soft robot can deform at any location due to the natural compliance of its materials. This introduces challenges in control, state estimation and robot planning.”
Just Getting Started
Still a relatively new field, soft robotics still must define their place in a growing number of industries. This poses challenges, but it also provides opportunities for creative ideas.
To maintain growth and adoption, soft robot development teams must cultivate expertise in a broad spectrum of engineering disciplines.
“Realization of a soft robot that senses and responds to its environment requires expertise in materials, electrical and mechanical engineering,” says Joseph Tracy, professor of materials science and engineering at North Carolina State University. “In one application space, a soft or rigid robot would be able to conduct a wide range of tasks and perform them with a high level of control, mimicking human behavior. The challenge is how to select the design that will give the desired result.”
SIDEBAR: Soft Actuators in the Works
If discussions of soft robots conjure up images of a Raggedy Ann-like R2-D2, that’s not an accurate representation of the technology. Today’s research teams and robotics developers focus their efforts on creating the building blocks of the technology. One area that offers a clear picture of this work lies in actuator development, where the creation of building materials and the design of this critical component come together.
It is particularly relevant to note that because of compliance, components made of soft materials can be driven differently than metal components. Soft materials don’t require motors the way that rigid components do.
“Soft robotic components are often driven by voltage difference, as in electroactive polymers, pressure difference, as in pneumatic actuators, or temperature change, as in shape-memory polymers,” says Gavriel Kleinwaks, a Ph.D. student at the University of Colorado, Boulder and a member of the Keplinger Research Group.
One of the most common types of soft robot is a pneumatic actuator. These consist of elastomeric shells, which are inflated with air and flex according to changes in the air pressure within the shells.
These shells are made by casting the elastomer into a 3D-printed mold. Different shapes achieve different types of motion, such as bending, contraction or twisting.
One major application is industrial gripper pick-and-place systems. The use of soft components in a gripper enables the device to handle delicate objects and to slightly wrap around objects.
Another type of soft robot is the hydraulically amplified self-healing electrostatic (HASEL) actuator (Fig. 3). These actuators consist of shells made from polymer sheets, such as polypropylene, filled with insulating oil and coated with conductive electrodes. The shells are heat sealed together, and the electrodes are screen-printed, which allows for quick design changes. In fact, new shapes can be made in the same amount of time as slight geometric adjustments.
When a voltage difference is applied across the electrodes, the electrodes zip together, moving the oil into the part of the shell not covered by electrodes. The actuators respond to electrical waveforms, producing a smooth muscle-like movement.
HASEL actuators are similar to pneumatic actuators, but they don’t require pumps. Because of their versatile manufacturing method, HASEL actuators can be made in a variety of forms, for various applications.
SIDEBAR: A Gripper with a Light Touch
Industries that require robots to have the handling and grasping capabilities of the human hand have been slow to deploy robotic systems.
“Conventional robotics are based on hard linkages, and thus they are unable to adapt to fragile or variable products,” says Carl Vause, CEO of Soft Robotics. “This is why such a small percentage of non-automotive industries have automated robots today. Picking a soft and variable object like an apple is an impossible task for a traditional rigid gripper.”

To address this shortcoming, however, some robotics developers have adopted a more unconventional approach. For example, Soft Robotics aims to solve this problem not with higher levels of design complexity, but through material science.
“To replicate the dexterity of the human hand to pick items, we couldn’t just develop incremental innovations,” says Vause. “We had to go in a completely different direction.”
The Soft Robotics’ mGrip gripping system is composed of robotic actuators made entirely of polymers. The grippers do not require sensors or other electromechanical devices for operation. All computational resources reside in the gripper.
The mGrip consists of a proprietary blend of materials with microfluidic channels that, when actuated, aim to mimic the grasping and gripping capabilities of the human hand (Fig. 4).
Subscribe to our FREE magazine, FREE email newsletters or both!
Latest News



